Types: N/A
Examples: N/A
Constructions: 17.5 Solving GLSP for Airplane Descent Path
Generalizations: N/A
Properties: N/A
Sufficiencies: N/A
Questions: N/A
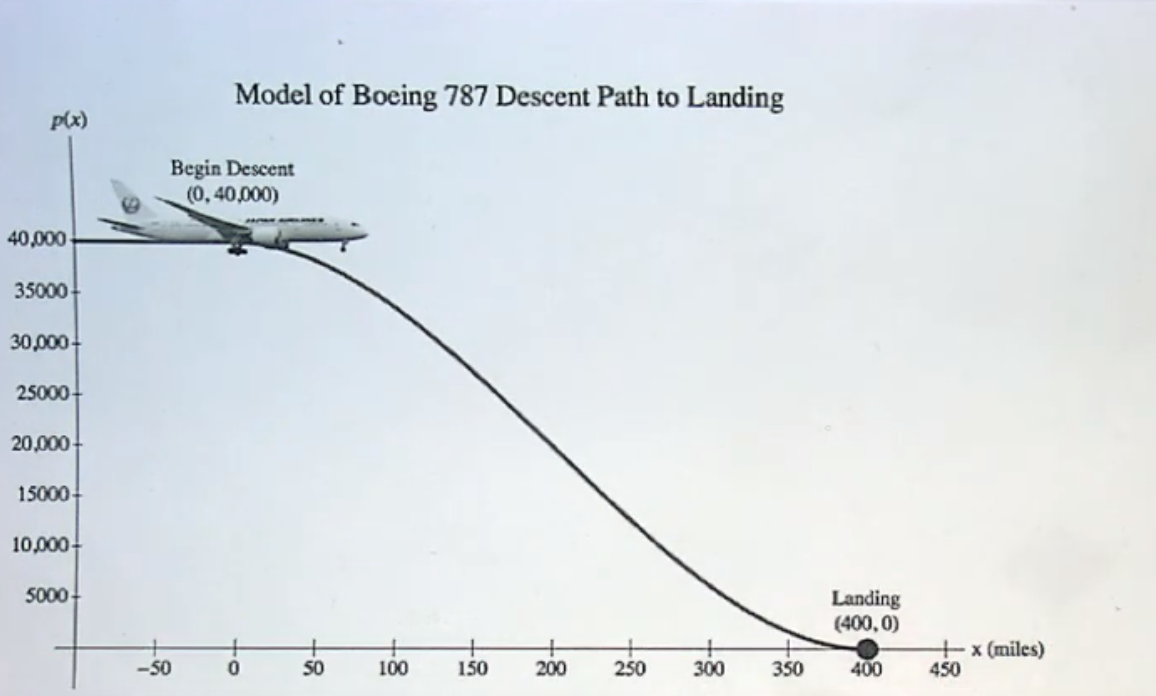
Using the graph of a Boeing 787's descent path to landing, create a mathematical model of the path.
Set up the GLSP
Airplane landings typically follow a smooth curve. A linear line would be too sharp. A quadratic path would cause us to crash. However, a cubic polynomial seems to provide a smooth curve, which we will use to model the descent.
Our goal is to find the parameters
Let's take a look at what each condition means.
Condition 1
We start our landing process at 40000 ft in the air and we assume this is 0 miles. In other words, we begin with our first equation
This is a linear equation based on the fact that we know the input and know the output. We can rewrite this as an 5.1 Inner Product Between Vectors.
Condition 2
We also know that our altitude will be 0 when we land. From our graph, we see that the altitude reaches 0 when
Once again, we can write this linear equation as an inner product.
Recall that matrices and vectors are data structures used to help us organize data. We can arrange our equations from conditions 1 and 2 into row form to produce 17.1 The General Linear-Systems Problem.
When we have a short and wide matrix, we generally have too many (infinite!) possible solutions. We need to enforce more constraints to produce a meaningful solution.
Condition 3
Before landing, we want our plane to be traveling horizontally. Mathematically, we can say we want the tangent line of our path to have 0 slope at the moment it starts to descend. Written using mathematical notation, we see
We can also take the derivative of our function
When we substitute in
- Note that we added
so we can create a 3.4 Row Vector of the scalars.
Once again, we can write this equation as an inner product.
This is now a third condition we can put into a matrix.
Condition 4
We also want the tangent line at the end of the landing path to have a 0 slope. After all, we do not want to crash into the ground.
We can plug this value into our equation for
And written as an inner product we see
Combining Conditions
Let's combine all four of these equations into a single system.
Each equation can be stored as a product. We can organize these products using matrices to form the system.
We have successfully set up a general linear-systems problem from a real world context. See 17.5 Solving GLSP for Airplane Descent Path for the final solution to this modeling problem.